Как любитель любого рода автоматизации и автоматики, давно подумывал о приобретении такого чудо-девайса, как робот-пылесос. На рынке эти устройства присутствуют достаточно давно, но уровень их «интеллекта» до недавнего времени для меня оставался слишком несущественным, чтобы я мог признать их именно роботами. И вот в бюджетном сегменте наконец начали появляться действительно «умные» модели. Об опыте практического использования и окончательном выборе одной из двух таких моделей и пойдёт речь в этой статье.
Здесь я постараюсь не заострять внимание на характеристиках, обзоре конструкций и других фактах, которые можно почерпнуть из многочисленных описаний, официальных и не очень. Я хочу поделиться в основном своими наблюдениями за поведением двух совершенно разных роботов, за результативностью их работы и удобством эксплуатации. То есть той информацией, которую я не мог получить иным путём, кроме личного тест-драйва, и которой мне не хватало для принятия окончательного решения. Возможно, кому-то эта статья поможет определиться с выбором.
Итак, после изучения спецификаций, цен, возможности покупки, чтения отзывов и просмотра видео, в зоне моего внимания осталось только два пылесоса – «iClebo Arte» производства южнокорейской фирмы «Yujin Robot» и «Neato XV-21» от североамериканской компании «Neato Robotics». Интеллект обеих этих моделей реализован на базе встроенного компьютера под управлением Linux. Первым у меня дома оказался iClebo Arte, пользовался им примерно месяц. Затем две недели наблюдал за взятым напрокат Neato XV-11, после чего приобрёл Neato XV-21, которым на момент написания этой статьи пользуюсь неделю.

Основная характеристика, позволяющая, по моему мнению, признать роботы-пылесосы именно роботами, — это полностью автоматическая интеллектуальная навигация. И именно логика построения маршрута интересовала меня изначально больше всего в этих устройствах.
В отличие от наводнивших рынок роботов-пылесосов iRoomba, алгоритм движения которых в основе построен на беспорядочных метаниях по комнате под произвольными углами (за исключением последних моделей, где начали проявляться зачатки ИИ), роботы iClebo и Neato для определения оптимальной траектории уборки умеют «строить карту помещения», как это пишут в характеристиках.
В верхнюю часть корпуса iClebo встроена широкоугольная фотокамера, направленная вверх, которая якобы делает снимки потолка и таким образом определяет периметр помещения. Я проводил тест с накидыванием тряпки на камеру, при этом поведение робота абсолютно никак не менялось. В итоге сложилось мнение, что камера — это какая-то фикция, так как логика построения траектории у этого робота, что с камерой, что без неё, была никак не связана с конфигурацией и расположением комнат в квартире.
Neato же имеет совершенно иную систему позиционирования – вращающийся лазерный дальномер с обзором в 360° в горизонтальной плоскости. Дальномер расположен в «башне» робота, выступающей над верхней плоскостью. За счёт этого габаритная высота Neato примерно на 1 см больше, чем у iClebo. Конечно же, я закрывал тряпкой и дальномер Neato, и робот действительно становился слепым и передвигался совсем неуверенно по оставшимся датчикам по периметру комнат, так и не приступая к уборке середины.
Алгоритм движения iClebo хоть и оптимален, но достаточно примитивен – параллельные зигзаги с обходом препятствий. От места старта, где бы оно не находилось, робот начинает движение вперёд до упора в препятствие, затем разворачивается, смещаясь в сторону на ширину одного прохода, и идёт назад снова до упора. При этом он невзирает на дверные проёмы, и если на очередном его проходе нет никаких препятствий, то он спокойно уезжает через открытые двери в другую комнату, а если на одной прямой расположено несколько дверей разных помещений, то и дальше, пока не упрётся в стену или какой-то предмет. Весь фактический интеллект робота заключается в том, что он запоминает убранные и неубранные участки, возвращаясь к ним впоследствии. То есть если на очередном зигзаге он уехал в другую комнату, то он запомнит, что он ещё не нашёл препятствий слева и справа от своего пути, и обязательно начнёт «заштриховывать» площадь сначала с одной стороны, потом с другой, пока эта площадь не будет ограничена по периметру препятствиями или уже убранными ранее участками.
Neato тоже строит оптимальный маршрут движения, но логика его расчёта кардинально отличается. Сначала он выезжает на какую-то произвольную точку помещения и несколько секунд сканирует периметр, медленно поворачиваясь вокруг своей оси. Затем, если не разобрался, может отъехать подальше и просканировать вновь с другой точки. После этого робот направляется к ближайшей стене и начинает движение по периметру комнаты. Направление обхода – всегда против часовой стрелки. Боковой датчик сближения расположен только на правой стороне бампера. Закончив обход периметра, робот приступает к зигзагообразной уборке середины помещения.
Neato XV-11, который у меня появился вначале, имел более старую прошивку версии 2.4. Но на деле эта прошивка оказалась удачнее. Основное отличие — в качестве определения дверных проёмов. Этот робот всегда определял их верно и убирал каждую комнату отдельно и целиком, а затем перебирался в соседнюю. Исключение составляли только маленькие помещения типа прихожей, ванной или коридора. Их Neato рассматривал как одно помещение сложной формы, обходил их все по периметру, а затем начинал уборку середины каждого помещения по очереди.
Более новая модель Neato XV-21 досталась мне уже с прошивкой 3.0, и здесь алгоритм был сильно изменён, теперь робот часто игнорирует дверные проёмы, но легко может поделить комнату на две части и убрать их поочерёдно, и даже не подряд. К сожалению, сервис обновления прошивки работает только вверх, и нет возможности сделать даунгрейд. Прошивок, как таковых, в виде файлов мне найти не удалось, да и процесс обновления производится только непосредственно через фирменный веб-сервис, который после проверки текущей прошивки робота лишь сообщает о наличии обновления, если оно есть, и предлагает обновить. Но радует тот факт, что в отличие от iClebo, у Neato основное развитие идёт не по железу, а по софту, история обновлений ПО насчитывает уже десяток версий, и по слухам грядёт очередное обновление до версии 3.1, которое обещает быть довольно интересным.
iClebo всегда движется по параллельным линиям относительно своего стартового положения, и никогда не подстраивается под линии стен, чтобы двигаться вдоль них. То есть если поставить базу под углом к стенам в квартире с простыми прямоугольными помещениями, то он так и будет убирать всю квартиру под углом. Хотя конечно в алгоритм заложено поведение «облизывания» препятствия – при обнаружении оного робот не просто разворачивается, а начинает идти вдоль линии препятствия, пока не сместиться на ширину своего предыдущего прохода, и только затем развернётся и пойдёт назад. Таким образом, вдоль всех стен он всё равно пройдет, но это может быть «кусочно», а не за один проход.
Neato же напротив всегда адаптируется именно под линии стен в помещении вне зависимости от своего стартового положения. Объехав периметр комнаты, робот принимает решение о направлении загзагов и начинает «заштриховывать» площадь параллельными стенам проходами. Здесь принципиальное различие в движении этих двух роботов в том, что iClebo в конце каждого прохода упирается в препятствие, а зигзаги Neato завершаются раньше – не доходя ширины одного прохода робота, который он делал при обходе периметра. Как следствие – Neato значительно реже долбится в препятствия бампером.
Ещё одна причина того, что Neato реже касается бампером стен и мебели, конечно же, в его всенаправленном лазерном дальномере. Этот навигационный прибор не замечает только препятствия, расположенные ниже его плоскости обзора. А у iClebo всего три точечных датчика сближения, один из них смотрит вперёд и два в стороны. По этой причине он частенько тыкается бампером в неширокие препятствия (ножки мебели, рёбра дверей), если они попадаются между датчиками. Вмятин и заметных царапин конечно не оставляет, но колотится довольно громко и ощутимо ударяет по мебели.
С поиском базы у обоих роботов обычно проблем не возникает, если только не случился сбой навигации. К сожалению, оба робота страдают такой бедой. Здесь у каждой модели свои особенности.
Сбои навигации Neato крайне редки, но возможны. Пока мало статистики набрано мной для окончательных выводов, но было уже три различных случая сбоев. Первый случился буквально на ровном месте – робот вдруг залихорадило, он беспорядочно дёргался влево-вправо-вперёд-назад на небольшом пятачке совершенно свободного пространства возле стены. После чего остановился и попросил расчистить ему путь. Расчищать было нечего, я просто сказал ему что расчистил, робот снова задёргался в конвульсиях, но через минуту смог побороть свой временный недуг и выехал. Однако осложнения не заставили себя ждать – робот полностью дезориентировался и начал уборку квартиры повторно, не найдя свою базу по завершении. Второй случай произошёл после борьбы робота с препятствием высотой около сантиметра в виде горизонтальной крашеной стальной трубы (опора сушилки для белья). Своими «глазами» это низкое препятствие он видеть не мог, а бампер с механическим датчиком столкновения оказался выше этого препятствия. Робот заехал на трубу передней частью и стал буксовать колёсами – слабые «грунтозацепы» и большой вес робота не позволяли преодолеть её. Сообразив, что что-то не в порядке, робот начал производить разнообразные манёвры, отъезжая назад, поворачиваясь в разные стороны и снова предпринимая попытки перескочить трубу то поперёк, то по диагонали, то задним ходом. Происходило это довольно долго, но безуспешно. В конце концов, робот плюнул на это занятие и поехал убираться, как ему показалось, дальше. Однако эта длительная борьба обернулась для него снова полнейшей дезориентацией в пространстве. Третий случай был и вовсе непонятен – в процессе уборки я просто дважды воспользовался функцией паузы (приостанавливал процесс уборки), после чего — снова дезориентация. Три случая за три недели – многовато. Хотя причины двух последних устранимы. Надеюсь на улучшенную прошивку.
С iClebo все гораздо хуже. Хуже настолько, что в итоге первый экземпляр этого робота отправился у меня на обмен, а второй экземпляр — на возврат в магазин, как товар ненадлежащего качества. Причина сбоев навигации iClebo – в постепенно копящейся ошибке параллельности проходов. Первый экземпляр iClebo обнаружил этот недостаток на второй-третий день. Проблема прогрессировала с каждым днём, что в итоге привело к полной невозможности использовать робот. Ошибка проявлялась в момент разворота робота в одну из сторон – разворот не всегда был равен ровно 180°, иногда чуть больше. Это приводило к тому, что новый проход был не параллелен предыдущему, и так с каждым новым разворотом всё больше и больше, в итоге накопленный угол ошибки достигал и 45°, и больше. В памяти робота же эта ошибка никак не учитывалась, он по-прежнему считал, что ходит параллельно (зачем тогда камера?), и его карта проходов в результате переставала соответствовать действительности. По этой причине робот терял возможность дальнейшей нормальной навигации, не мог найти незавершённые участки квартиры, которые в итоге так и оставались неубранными, а другие участки убирал повторно, считая их новой площадью. В самом худшем варианте робот просто терял возможность дальнейшего движения, переходя в режим бесконечного циклического тыканья носом в стену и рысканья вдоль неё влево-вправо на участке около метра в поисках прохода, который, по его мнению, здесь обязательно должен быть. Заканчивалось это дело обычно ошибкой и остановкой.
Под конец 15-дневного срока со дня покупки этот экземпляр я вернул в магазин, брак был признан и выдан новый экземпляр на замену. Второй iClebo показал себя значительно лучше в плане навигации, и первые дни вёл себя просто превосходно. Но, к моему разочарованию, через несколько дней и этот экземпляр обнаружил вышеописанный недостаток, хотя и гораздо менее выраженный. Чаще всего проблем не возникало, но иногда так же оставались неубранные куски и возникали блуждания вдоль стен в безуспешных поисках базы.
Это и стало основной причиной отказа от iClebo Arte в пользу Neato XV-21. Возможно, я попал на бракованную партию iClebo, так как отзывов с подобными проблемами мне на глаза не попадалось. Поэтому вывод о превосходстве одной системы навигации над другой в данном случае может быть не объективен. Магазин без проблем принял и этого робота и предложил на замену взять Neato, что я и сделал.
Строго говоря, iClebo Arte – не пылесос, а турбовеник. Основной эффект уборки достигается грамотно сделанной вращающейся щеткой с правильно расположенной скребковой резинкой. Мусор с пола не засасывается, а заметается в контейнер. Мощность всасывания настолько мала, что мне так и не удалось найти, где же у этого пылесоса выдув воздуха, он не ощущался руками ни с какой стороны, и конструктивно не обнаружилось никаких выходных воздуховодов или решёток. «Вакуумный» эффект, видимо, используется только чтобы пыль не сильно разлеталась от турбощётки и боковых метёлок-вертолётов, коих тут две, и после подъёма щёткой к контейнеру не падала обратно. Однако пыль всё равно разлетается по сторонам. После уборки днище робота сплошь покрыто ровным слоем мельчайшей пыли. Также существенно пылится и его верхняя часть. При наблюдении за роботом вдоль пола на фоне чего-то тёмного было хорошо видно, что он движется в облаке пыли, поднимаемом щётками. Но, тем не менее, и в своём контейнере пылесос после каждой уборки привозил достаточно много мусора. Малая мощность всасывания позволила сделать этот робот очень тихим в уборке. Шум от его работы сравним с детской игрушкой на батарейках.
Neato напротив — именно вакуумный пылесос. Он также имеет похожую турбощётку, но мощность всасывания у него несравнимо выше – из задней части робота вырывается мощная струя воздуха. Конечно же, он гораздо шумнее в работе, громкость телевизора приходится поднимать вдвое. Предыдущая модель Neato XV-11 имела в комплекте лишь одну щётку – с прямыми рядами пластиковых лепестков. Эта конструкция создавала дополнительный неприятный гудящий шум. Новая модель Neato XV-21 имеет уже две щётки в комплекте, и вторая со спирально расположенными рядами лепестков и щетины. Эта щётка работает совершенно бесшумно, но сам пылесос всё равно шумный. В отличие от iClebo, корпус Neato в процессе уборки не запыливается ни сверху, ни снизу. Этот пылесос абсолютно не поднимает облаков пыли вокруг себя. Однако количество мусора, которое он собирает, не намного больше, чем у iClebo. Оба пылесоса одинаково хорошо убирают крупную пыль, шерсть, волосы, что и составляет основной объём собранного мусора. iClebo плохо убирает лишь мелкую пыль.
С уборкой вдоль стен и в углах у обоих роботов проблемы. Причём гораздо более существенные проблемы здесь у Neato. Этот робот не имеет боковых щёток-вертолётов, и его основная щётка уже, чем корпус робота, на 4 см с каждой стороны. В итоге примерно 5 см вдоль всех стен и мебели остаются никогда не убранными. Мощности всасывания, хоть она и велика, не хватает для засасывания мусора со стороны.
iClebo вдоль стен пыль скорее не убирает, а разбрасывает по сторонам боковыми щётками более равномерно. Что-то будет убрано сейчас, что-то завтра. Но, по крайней мере, видимого мусора вдоль стен не остаётся и не накапливается. В отличие от Neato, с которым этот мусор копится день ото дня, и возникают уже заметные пыльные полосы вдоль стен.
С углами у iClebo неважно, треугольнички со сторонами примерно 5-7 см остаются недосягаемы для уборки. У Neato c углами совсем всё плохо. Его адаптивный алгоритм обхода препятствий и сыроватый способ разворота в углах оставляют существенные неубранные куски, причем как на внутренних, так и на внешних углах. Надежда снова на обновлённую прошивку, где, судя по видео, эта проблема частично решена:
Neato также не может похвастаться хорошей проходимостью, по этому критерию iClebo тоже безусловно выигрывает. Он вдвое меньше весит – около 3 кг против примерно 6 кг у Neato, его колёса шире и имеют более эффективные «грунтозацепы». Ни разу не замечал, чтобы этот робот где-то буксовал. Neato же страдает этой бедой постоянно, буксует при попытке заехать на коврики, на высокий порожек. Часто это заканчивается откатом назад и проездом такого «препятствия» по диагонали. Иногда и это не помогает, и тогда робот останавливается и просит расчистить ему путь.
У обоих роботов есть несколько приятных особенностей, которые по большому счёту не должны влиять на выбор, но упомянуть о них с точки зрения юзабилити интересно. Больше таких плюшек у iClebo. Во-первых, он имеет пульт дистанционного управления, с которого можно производить все действия с пылесосом – задавать режимы уборки, запускать уборку и делать паузу, программировать суточный таймер, и даже просто перемещать робот нажатиями кнопок направления поворота и движения. Казалось бы, бесполезная вещь. Однако она крайне удобна в том случае, когда база робота расположена в труднодоступном месте, например под диваном или под столом. В этом случае не нужно ползать за роботом для очистки его контейнера, а можно просто вызвать его с пульта в более удобное место. К тому же на пульте есть кнопка команды возвращения на базу, по которой робот самостоятельно возвращается на подзарядку. В Neato команда возвращения на базу отсутствует напрочь, вернуться туда сам он может, только если стартовал с нее и полностью и без проблем завершил уборку.
Во-вторых, iClebo имеет режим влажной протирки. Нужно намочить микрофибру, идущую в комплекте, насадить её на швабру, а швабру на пылесос. Не вполне удобно, и режим преодоления препятствий в этом случае не работает, но на протирку одной комнаты хватает – собирает как раз ту мельчайшую пыль, которую разбросал по сторонам и не смог засосать. Кроме того в iClebo есть режим максимальной уборки, в котором по завершении основной уборки по оптимальному зигзагообразному маршруту робот повторяет уборку по классическому хаотично-диагональному маршруту до тех пор, пока не закончится заряд батареи. Таким образом, качество уборки поднимается ещё выше.
Neato не может похвастаться таким разнообразием функционала, он имеет лишь две отличительные особенности. Первая — это возможность программировать время уборки на каждый день недели отдельно, в то время как iClebo имеет только одну установку времени уборки и будет убираться ежедневно в заданное время. Вторая – это графический ЖК-дисплей, на котором помимо меню робот выводит разнообразные сообщения и ошибки типа «Пожалуйста, очистите мне путь», «Я возвращаюсь на базу для подзарядки», «Спасибо за очистку моего контейнера и фильтра» и тому подобное. Мелочь, а приятно. В iClebo дисплей цифровой семисегментный, ошибки выводятся в виде цифровых кодов, которые можно расшифровать по шпаргалке, расположенной под крышкой базы.
Безусловно, робот-пылесос не способен полностью исключить из жизни ручную уборку квартиры. Всегда найдутся места, в которые робот не сможет попасть из-за своих габаритов. Например, ножка мебели, расположенной в углу комнаты – за неё роботу просто не заехать. Но, тем не менее, прибегать к ручной уборке теперь нужно гораздо реже. Если раньше мы убирали квартиру в среднем раз в неделю, то теперь это достаточно делать не чаще раза в месяц. За полтора месяца использования роботов-пылесосов к ручной уборке пришлось прибегнуть всего один раз. Для себя я сделал однозначный вывод, что робот-пылесос не просто любопытная игрушка, а и весьма полезный гаджет в доме.
Интересная статья о внутреннем устройстве Neato, об алгоритме навигации и программировании робота
Для удобства сравнения сводная таблица основных критериев выбора:
Большое зеркало установлено непосредственно на полу под прямым углом к плоскости пола.
Зеркало шкафа начинается на высоте 84 мм от пола.
Глубина цоколя шкафа — 40 мм относительно плоскости зеркала.
Высота робота без башни — 83 мм.
Высота плоскости сканирования дальномера — 87 мм.
Здесь я постараюсь не заострять внимание на характеристиках, обзоре конструкций и других фактах, которые можно почерпнуть из многочисленных описаний, официальных и не очень. Я хочу поделиться в основном своими наблюдениями за поведением двух совершенно разных роботов, за результативностью их работы и удобством эксплуатации. То есть той информацией, которую я не мог получить иным путём, кроме личного тест-драйва, и которой мне не хватало для принятия окончательного решения. Возможно, кому-то эта статья поможет определиться с выбором.
Итак, после изучения спецификаций, цен, возможности покупки, чтения отзывов и просмотра видео, в зоне моего внимания осталось только два пылесоса – «iClebo Arte» производства южнокорейской фирмы «Yujin Robot» и «Neato XV-21» от североамериканской компании «Neato Robotics». Интеллект обеих этих моделей реализован на базе встроенного компьютера под управлением Linux. Первым у меня дома оказался iClebo Arte, пользовался им примерно месяц. Затем две недели наблюдал за взятым напрокат Neato XV-11, после чего приобрёл Neato XV-21, которым на момент написания этой статьи пользуюсь неделю.
iClebo Arte

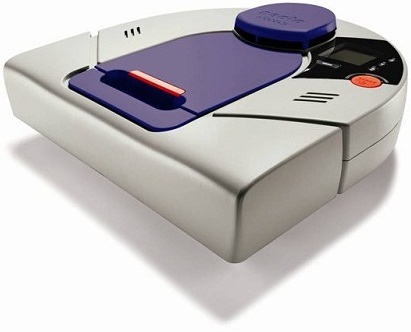
Neato XV-21
Принцип навигации и логика построения маршрута
Основная характеристика, позволяющая, по моему мнению, признать роботы-пылесосы именно роботами, — это полностью автоматическая интеллектуальная навигация. И именно логика построения маршрута интересовала меня изначально больше всего в этих устройствах.
В отличие от наводнивших рынок роботов-пылесосов iRoomba, алгоритм движения которых в основе построен на беспорядочных метаниях по комнате под произвольными углами (за исключением последних моделей, где начали проявляться зачатки ИИ), роботы iClebo и Neato для определения оптимальной траектории уборки умеют «строить карту помещения», как это пишут в характеристиках.
В верхнюю часть корпуса iClebo встроена широкоугольная фотокамера, направленная вверх, которая якобы делает снимки потолка и таким образом определяет периметр помещения. Я проводил тест с накидыванием тряпки на камеру, при этом поведение робота абсолютно никак не менялось. В итоге сложилось мнение, что камера — это какая-то фикция, так как логика построения траектории у этого робота, что с камерой, что без неё, была никак не связана с конфигурацией и расположением комнат в квартире.
Neato же имеет совершенно иную систему позиционирования – вращающийся лазерный дальномер с обзором в 360° в горизонтальной плоскости. Дальномер расположен в «башне» робота, выступающей над верхней плоскостью. За счёт этого габаритная высота Neato примерно на 1 см больше, чем у iClebo. Конечно же, я закрывал тряпкой и дальномер Neato, и робот действительно становился слепым и передвигался совсем неуверенно по оставшимся датчикам по периметру комнат, так и не приступая к уборке середины.
Алгоритм движения iClebo хоть и оптимален, но достаточно примитивен – параллельные зигзаги с обходом препятствий. От места старта, где бы оно не находилось, робот начинает движение вперёд до упора в препятствие, затем разворачивается, смещаясь в сторону на ширину одного прохода, и идёт назад снова до упора. При этом он невзирает на дверные проёмы, и если на очередном его проходе нет никаких препятствий, то он спокойно уезжает через открытые двери в другую комнату, а если на одной прямой расположено несколько дверей разных помещений, то и дальше, пока не упрётся в стену или какой-то предмет. Весь фактический интеллект робота заключается в том, что он запоминает убранные и неубранные участки, возвращаясь к ним впоследствии. То есть если на очередном зигзаге он уехал в другую комнату, то он запомнит, что он ещё не нашёл препятствий слева и справа от своего пути, и обязательно начнёт «заштриховывать» площадь сначала с одной стороны, потом с другой, пока эта площадь не будет ограничена по периметру препятствиями или уже убранными ранее участками.
Neato тоже строит оптимальный маршрут движения, но логика его расчёта кардинально отличается. Сначала он выезжает на какую-то произвольную точку помещения и несколько секунд сканирует периметр, медленно поворачиваясь вокруг своей оси. Затем, если не разобрался, может отъехать подальше и просканировать вновь с другой точки. После этого робот направляется к ближайшей стене и начинает движение по периметру комнаты. Направление обхода – всегда против часовой стрелки. Боковой датчик сближения расположен только на правой стороне бампера. Закончив обход периметра, робот приступает к зигзагообразной уборке середины помещения.
Neato XV-11, который у меня появился вначале, имел более старую прошивку версии 2.4. Но на деле эта прошивка оказалась удачнее. Основное отличие — в качестве определения дверных проёмов. Этот робот всегда определял их верно и убирал каждую комнату отдельно и целиком, а затем перебирался в соседнюю. Исключение составляли только маленькие помещения типа прихожей, ванной или коридора. Их Neato рассматривал как одно помещение сложной формы, обходил их все по периметру, а затем начинал уборку середины каждого помещения по очереди.
Более новая модель Neato XV-21 досталась мне уже с прошивкой 3.0, и здесь алгоритм был сильно изменён, теперь робот часто игнорирует дверные проёмы, но легко может поделить комнату на две части и убрать их поочерёдно, и даже не подряд. К сожалению, сервис обновления прошивки работает только вверх, и нет возможности сделать даунгрейд. Прошивок, как таковых, в виде файлов мне найти не удалось, да и процесс обновления производится только непосредственно через фирменный веб-сервис, который после проверки текущей прошивки робота лишь сообщает о наличии обновления, если оно есть, и предлагает обновить. Но радует тот факт, что в отличие от iClebo, у Neato основное развитие идёт не по железу, а по софту, история обновлений ПО насчитывает уже десяток версий, и по слухам грядёт очередное обновление до версии 3.1, которое обещает быть довольно интересным.
iClebo всегда движется по параллельным линиям относительно своего стартового положения, и никогда не подстраивается под линии стен, чтобы двигаться вдоль них. То есть если поставить базу под углом к стенам в квартире с простыми прямоугольными помещениями, то он так и будет убирать всю квартиру под углом. Хотя конечно в алгоритм заложено поведение «облизывания» препятствия – при обнаружении оного робот не просто разворачивается, а начинает идти вдоль линии препятствия, пока не сместиться на ширину своего предыдущего прохода, и только затем развернётся и пойдёт назад. Таким образом, вдоль всех стен он всё равно пройдет, но это может быть «кусочно», а не за один проход.
Neato же напротив всегда адаптируется именно под линии стен в помещении вне зависимости от своего стартового положения. Объехав периметр комнаты, робот принимает решение о направлении загзагов и начинает «заштриховывать» площадь параллельными стенам проходами. Здесь принципиальное различие в движении этих двух роботов в том, что iClebo в конце каждого прохода упирается в препятствие, а зигзаги Neato завершаются раньше – не доходя ширины одного прохода робота, который он делал при обходе периметра. Как следствие – Neato значительно реже долбится в препятствия бампером.
Ещё одна причина того, что Neato реже касается бампером стен и мебели, конечно же, в его всенаправленном лазерном дальномере. Этот навигационный прибор не замечает только препятствия, расположенные ниже его плоскости обзора. А у iClebo всего три точечных датчика сближения, один из них смотрит вперёд и два в стороны. По этой причине он частенько тыкается бампером в неширокие препятствия (ножки мебели, рёбра дверей), если они попадаются между датчиками. Вмятин и заметных царапин конечно не оставляет, но колотится довольно громко и ощутимо ударяет по мебели.
С поиском базы у обоих роботов обычно проблем не возникает, если только не случился сбой навигации. К сожалению, оба робота страдают такой бедой. Здесь у каждой модели свои особенности.
Сбои навигации
Сбои навигации Neato крайне редки, но возможны. Пока мало статистики набрано мной для окончательных выводов, но было уже три различных случая сбоев. Первый случился буквально на ровном месте – робот вдруг залихорадило, он беспорядочно дёргался влево-вправо-вперёд-назад на небольшом пятачке совершенно свободного пространства возле стены. После чего остановился и попросил расчистить ему путь. Расчищать было нечего, я просто сказал ему что расчистил, робот снова задёргался в конвульсиях, но через минуту смог побороть свой временный недуг и выехал. Однако осложнения не заставили себя ждать – робот полностью дезориентировался и начал уборку квартиры повторно, не найдя свою базу по завершении. Второй случай произошёл после борьбы робота с препятствием высотой около сантиметра в виде горизонтальной крашеной стальной трубы (опора сушилки для белья). Своими «глазами» это низкое препятствие он видеть не мог, а бампер с механическим датчиком столкновения оказался выше этого препятствия. Робот заехал на трубу передней частью и стал буксовать колёсами – слабые «грунтозацепы» и большой вес робота не позволяли преодолеть её. Сообразив, что что-то не в порядке, робот начал производить разнообразные манёвры, отъезжая назад, поворачиваясь в разные стороны и снова предпринимая попытки перескочить трубу то поперёк, то по диагонали, то задним ходом. Происходило это довольно долго, но безуспешно. В конце концов, робот плюнул на это занятие и поехал убираться, как ему показалось, дальше. Однако эта длительная борьба обернулась для него снова полнейшей дезориентацией в пространстве. Третий случай был и вовсе непонятен – в процессе уборки я просто дважды воспользовался функцией паузы (приостанавливал процесс уборки), после чего — снова дезориентация. Три случая за три недели – многовато. Хотя причины двух последних устранимы. Надеюсь на улучшенную прошивку.
С iClebo все гораздо хуже. Хуже настолько, что в итоге первый экземпляр этого робота отправился у меня на обмен, а второй экземпляр — на возврат в магазин, как товар ненадлежащего качества. Причина сбоев навигации iClebo – в постепенно копящейся ошибке параллельности проходов. Первый экземпляр iClebo обнаружил этот недостаток на второй-третий день. Проблема прогрессировала с каждым днём, что в итоге привело к полной невозможности использовать робот. Ошибка проявлялась в момент разворота робота в одну из сторон – разворот не всегда был равен ровно 180°, иногда чуть больше. Это приводило к тому, что новый проход был не параллелен предыдущему, и так с каждым новым разворотом всё больше и больше, в итоге накопленный угол ошибки достигал и 45°, и больше. В памяти робота же эта ошибка никак не учитывалась, он по-прежнему считал, что ходит параллельно (зачем тогда камера?), и его карта проходов в результате переставала соответствовать действительности. По этой причине робот терял возможность дальнейшей нормальной навигации, не мог найти незавершённые участки квартиры, которые в итоге так и оставались неубранными, а другие участки убирал повторно, считая их новой площадью. В самом худшем варианте робот просто терял возможность дальнейшего движения, переходя в режим бесконечного циклического тыканья носом в стену и рысканья вдоль неё влево-вправо на участке около метра в поисках прохода, который, по его мнению, здесь обязательно должен быть. Заканчивалось это дело обычно ошибкой и остановкой.
Под конец 15-дневного срока со дня покупки этот экземпляр я вернул в магазин, брак был признан и выдан новый экземпляр на замену. Второй iClebo показал себя значительно лучше в плане навигации, и первые дни вёл себя просто превосходно. Но, к моему разочарованию, через несколько дней и этот экземпляр обнаружил вышеописанный недостаток, хотя и гораздо менее выраженный. Чаще всего проблем не возникало, но иногда так же оставались неубранные куски и возникали блуждания вдоль стен в безуспешных поисках базы.
Это и стало основной причиной отказа от iClebo Arte в пользу Neato XV-21. Возможно, я попал на бракованную партию iClebo, так как отзывов с подобными проблемами мне на глаза не попадалось. Поэтому вывод о превосходстве одной системы навигации над другой в данном случае может быть не объективен. Магазин без проблем принял и этого робота и предложил на замену взять Neato, что я и сделал.
Качество уборки
Строго говоря, iClebo Arte – не пылесос, а турбовеник. Основной эффект уборки достигается грамотно сделанной вращающейся щеткой с правильно расположенной скребковой резинкой. Мусор с пола не засасывается, а заметается в контейнер. Мощность всасывания настолько мала, что мне так и не удалось найти, где же у этого пылесоса выдув воздуха, он не ощущался руками ни с какой стороны, и конструктивно не обнаружилось никаких выходных воздуховодов или решёток. «Вакуумный» эффект, видимо, используется только чтобы пыль не сильно разлеталась от турбощётки и боковых метёлок-вертолётов, коих тут две, и после подъёма щёткой к контейнеру не падала обратно. Однако пыль всё равно разлетается по сторонам. После уборки днище робота сплошь покрыто ровным слоем мельчайшей пыли. Также существенно пылится и его верхняя часть. При наблюдении за роботом вдоль пола на фоне чего-то тёмного было хорошо видно, что он движется в облаке пыли, поднимаемом щётками. Но, тем не менее, и в своём контейнере пылесос после каждой уборки привозил достаточно много мусора. Малая мощность всасывания позволила сделать этот робот очень тихим в уборке. Шум от его работы сравним с детской игрушкой на батарейках.
Neato напротив — именно вакуумный пылесос. Он также имеет похожую турбощётку, но мощность всасывания у него несравнимо выше – из задней части робота вырывается мощная струя воздуха. Конечно же, он гораздо шумнее в работе, громкость телевизора приходится поднимать вдвое. Предыдущая модель Neato XV-11 имела в комплекте лишь одну щётку – с прямыми рядами пластиковых лепестков. Эта конструкция создавала дополнительный неприятный гудящий шум. Новая модель Neato XV-21 имеет уже две щётки в комплекте, и вторая со спирально расположенными рядами лепестков и щетины. Эта щётка работает совершенно бесшумно, но сам пылесос всё равно шумный. В отличие от iClebo, корпус Neato в процессе уборки не запыливается ни сверху, ни снизу. Этот пылесос абсолютно не поднимает облаков пыли вокруг себя. Однако количество мусора, которое он собирает, не намного больше, чем у iClebo. Оба пылесоса одинаково хорошо убирают крупную пыль, шерсть, волосы, что и составляет основной объём собранного мусора. iClebo плохо убирает лишь мелкую пыль.
С уборкой вдоль стен и в углах у обоих роботов проблемы. Причём гораздо более существенные проблемы здесь у Neato. Этот робот не имеет боковых щёток-вертолётов, и его основная щётка уже, чем корпус робота, на 4 см с каждой стороны. В итоге примерно 5 см вдоль всех стен и мебели остаются никогда не убранными. Мощности всасывания, хоть она и велика, не хватает для засасывания мусора со стороны.
iClebo вдоль стен пыль скорее не убирает, а разбрасывает по сторонам боковыми щётками более равномерно. Что-то будет убрано сейчас, что-то завтра. Но, по крайней мере, видимого мусора вдоль стен не остаётся и не накапливается. В отличие от Neato, с которым этот мусор копится день ото дня, и возникают уже заметные пыльные полосы вдоль стен.
С углами у iClebo неважно, треугольнички со сторонами примерно 5-7 см остаются недосягаемы для уборки. У Neato c углами совсем всё плохо. Его адаптивный алгоритм обхода препятствий и сыроватый способ разворота в углах оставляют существенные неубранные куски, причем как на внутренних, так и на внешних углах. Надежда снова на обновлённую прошивку, где, судя по видео, эта проблема частично решена:
Neato также не может похвастаться хорошей проходимостью, по этому критерию iClebo тоже безусловно выигрывает. Он вдвое меньше весит – около 3 кг против примерно 6 кг у Neato, его колёса шире и имеют более эффективные «грунтозацепы». Ни разу не замечал, чтобы этот робот где-то буксовал. Neato же страдает этой бедой постоянно, буксует при попытке заехать на коврики, на высокий порожек. Часто это заканчивается откатом назад и проездом такого «препятствия» по диагонали. Иногда и это не помогает, и тогда робот останавливается и просит расчистить ему путь.
Плюшки
У обоих роботов есть несколько приятных особенностей, которые по большому счёту не должны влиять на выбор, но упомянуть о них с точки зрения юзабилити интересно. Больше таких плюшек у iClebo. Во-первых, он имеет пульт дистанционного управления, с которого можно производить все действия с пылесосом – задавать режимы уборки, запускать уборку и делать паузу, программировать суточный таймер, и даже просто перемещать робот нажатиями кнопок направления поворота и движения. Казалось бы, бесполезная вещь. Однако она крайне удобна в том случае, когда база робота расположена в труднодоступном месте, например под диваном или под столом. В этом случае не нужно ползать за роботом для очистки его контейнера, а можно просто вызвать его с пульта в более удобное место. К тому же на пульте есть кнопка команды возвращения на базу, по которой робот самостоятельно возвращается на подзарядку. В Neato команда возвращения на базу отсутствует напрочь, вернуться туда сам он может, только если стартовал с нее и полностью и без проблем завершил уборку.
Во-вторых, iClebo имеет режим влажной протирки. Нужно намочить микрофибру, идущую в комплекте, насадить её на швабру, а швабру на пылесос. Не вполне удобно, и режим преодоления препятствий в этом случае не работает, но на протирку одной комнаты хватает – собирает как раз ту мельчайшую пыль, которую разбросал по сторонам и не смог засосать. Кроме того в iClebo есть режим максимальной уборки, в котором по завершении основной уборки по оптимальному зигзагообразному маршруту робот повторяет уборку по классическому хаотично-диагональному маршруту до тех пор, пока не закончится заряд батареи. Таким образом, качество уборки поднимается ещё выше.
Neato не может похвастаться таким разнообразием функционала, он имеет лишь две отличительные особенности. Первая — это возможность программировать время уборки на каждый день недели отдельно, в то время как iClebo имеет только одну установку времени уборки и будет убираться ежедневно в заданное время. Вторая – это графический ЖК-дисплей, на котором помимо меню робот выводит разнообразные сообщения и ошибки типа «Пожалуйста, очистите мне путь», «Я возвращаюсь на базу для подзарядки», «Спасибо за очистку моего контейнера и фильтра» и тому подобное. Мелочь, а приятно. В iClebo дисплей цифровой семисегментный, ошибки выводятся в виде цифровых кодов, которые можно расшифровать по шпаргалке, расположенной под крышкой базы.
Резюме
Безусловно, робот-пылесос не способен полностью исключить из жизни ручную уборку квартиры. Всегда найдутся места, в которые робот не сможет попасть из-за своих габаритов. Например, ножка мебели, расположенной в углу комнаты – за неё роботу просто не заехать. Но, тем не менее, прибегать к ручной уборке теперь нужно гораздо реже. Если раньше мы убирали квартиру в среднем раз в неделю, то теперь это достаточно делать не чаще раза в месяц. За полтора месяца использования роботов-пылесосов к ручной уборке пришлось прибегнуть всего один раз. Для себя я сделал однозначный вывод, что робот-пылесос не просто любопытная игрушка, а и весьма полезный гаджет в доме.
Интересная статья о внутреннем устройстве Neato, об алгоритме навигации и программировании робота
Для удобства сравнения сводная таблица основных критериев выбора:
| Критерий | iClebo Arte | Neato XV-21 |
|---|---|---|
| Качество навигации | хуже | лучше |
| Частота сбоев навигации | чаще | реже |
| Частота соударений с препятствиями | больше | меньше |
| Качество уборки середины помещений | ниже | выше |
| Качество уборки углов и вдоль стен | выше | ниже |
| Шумность работы | ниже | выше |
| Время, затрачиваемое на уборку | примерно равно | примерно равно |
| Время работы от одного заряда | больше | меньше |
| Проходимость | лучше | хуже |
| Возможность обновления ПО | под вопросом | есть |
| Цена | чуть выше | чуть ниже |
Тест Neato XV-21 на навигацию в зеркальной обстановке
Большое зеркало установлено непосредственно на полу под прямым углом к плоскости пола.
Зеркало шкафа начинается на высоте 84 мм от пола.
Глубина цоколя шкафа — 40 мм относительно плоскости зеркала.
Высота робота без башни — 83 мм.
Высота плоскости сканирования дальномера — 87 мм.
