
Я не буду говорить о том, что за этим направлением будущее. Но для тех, кто только делает первые шаги во фрилансе важно знать, что отечественный рынок не очень привлекателен. Нужно ровняться на западные биржи где платят в валюте, по нашим меркам достойно, а по ихним… скажем так, достаточно. Был бы я начитанней, сразу стал осваивать штурмовать Эланс и ему подобные, но укоренился на родной ниве.
О выборе узкого направления я уже писал в статье о Google Trends, а здесь попытаюсь кратенько объяснить на фактах, почему перспектива больших денег лежит именно за границей.
1. Давайте посмотрим, как выглядит карта мира с подсветкой всех устройств, подключенных к интернету.
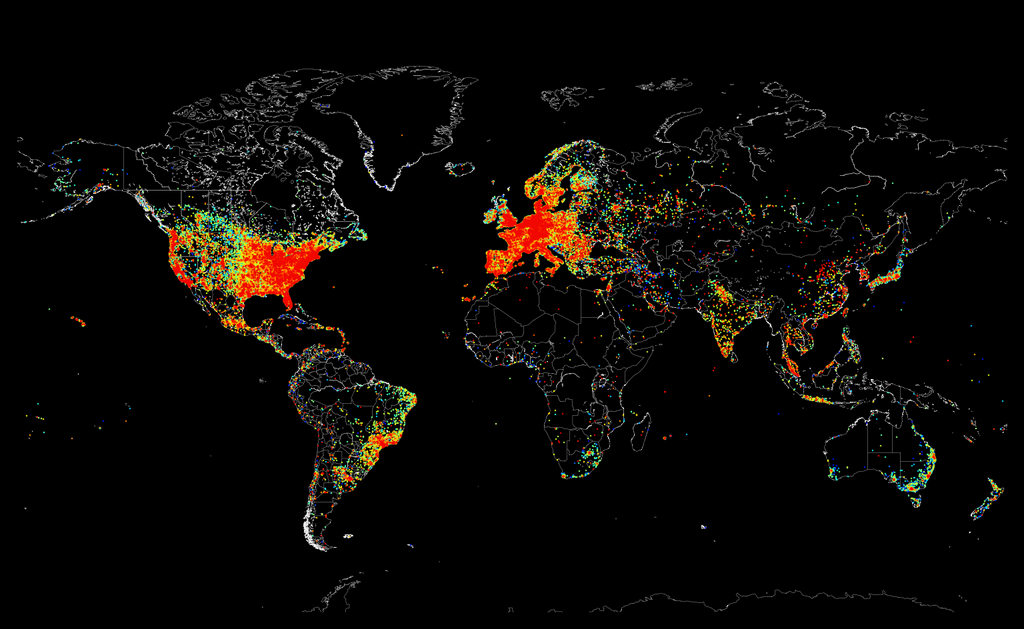
Даже слепой увидит, что рынок наиболее насыщен в англоязычном сегменте и Европе. Успешно созданный там продукт сделает вас властелином, если не мира, то неплохого коттеджа в Монако. Поэтому в разработке ПО следует держать ориентир на места скопления пользователей, это очевидно.
2. Давайте посмотрим на карту перелетов.
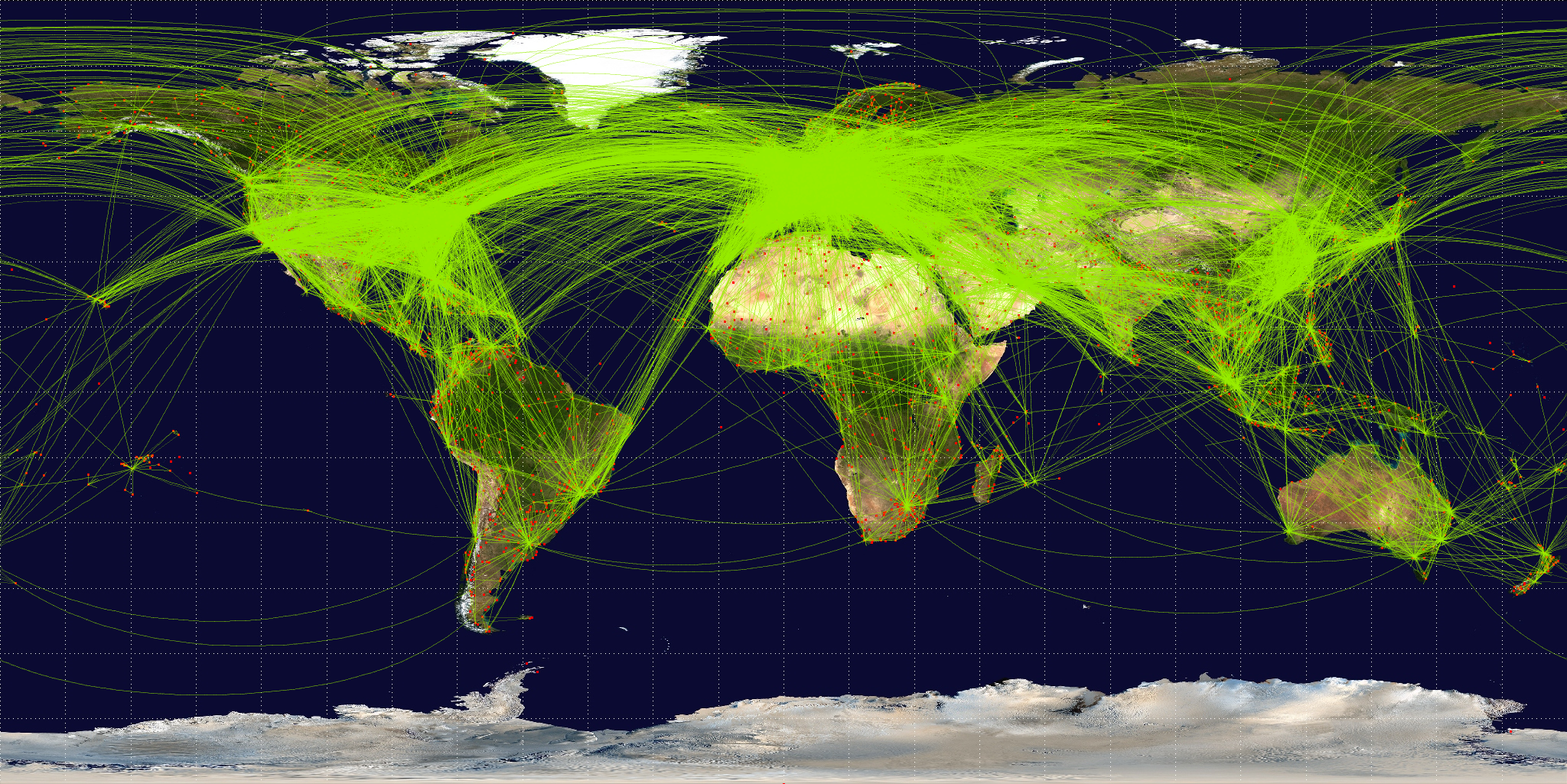
Люди мигрируют в более привлекательные, более комфортные для проживания страны. Больше людей — больше туристов — больше потребления — больше спрос — больше рынок! Опять же, лидеров выделяйте сами.
3. Взглянем на карту освещенности земли.

Вывод: исследуйте факты, покоряйте зарубежные рынки, станьте успешным!
